第十章 設施內施藥作業自動化
盛中德 興大農機系
一、設施內病害與蟲害防治理念
二、設施內病蟲害防治之方法
三、設施內病蟲害防治技術與設備
利用設施栽培作物之目的,即在改變天候條件之限制,以提
升作物品質、調整產期及降低病蟲害威脅。但病蟲害種類繁
多,利用設施改變作物生長環境,雖可抑制某些病害之發
生,但往往又創造出原屬於次要病害之適當生長條件,由於
栽培者對於每一種作物病害之發生習性與生態未能全盤掌
握,以致造成病害重覆輾轉發生,對作物品質之提升未能達
到預期的效果。
設施內有較外界穩定的環境,受不良天候的影響較低,
植物有較佳生育條件,而通常此條件亦有利昆蟲生長。密閉
式設施雖可阻絕害蟲於一時,但亦無法長期徹底避免害蟲的
侵入,設施內常終年栽植相近種類的植物,害蟲就會持續繁
衍而不虞食物缺乏,有些原本僅在某一季節出現的害蟲,四
季均會在設施內出現,形成設施栽培中特殊的蟲害問題。
設施內作物栽培時病蟲害的發生是必然的,在作物生產
過程中,除以物理性或生物性防制技術外,利用藥物進行病
蟲害防治工作一直是不可或缺的,由國內每年近50億元的
農藥消耗量,應可想像在整個農業生產中病蟲害防治作業的
龐大。
病蟲害防治的理念在確保生產,因此植物保護必須為考
慮的重點,在以往人的保護與環境的維護普遍未受到應有的
重視,因此有關農藥使用後農民中毒、破壞生態環境的問題
至今仍時有所聞。但隨著經濟的發達,有關人類生活權意識
的抬頭,環境保護觀念的覺醒,在病蟲害防治的理念上,已
從以往只考慮植物保護,演進為必須同時兼顧人與環境的保
護,而此處所謂的人包括了生產者與消費者。
在病蟲害防治中農藥的使用雖不可避免,但防治工作應
先從病原體與害蟲的入侵防止以及設施內病蟲害的增殖抑制
著手,並精確的判斷病蟲害是否流行,再施以農藥防治,如
此才是符合經濟的防治理念。農藥施用不宜過度頻繁或過量
,以免造成病蟲生物產生抗藥性,使藥濟失去原有的效果,
或造成藥害,對作物、人與環境產生危害,因而設施內病蟲
害防治的另一重要理念即朝施藥自動化與適量化發展。
在設施內栽培的作物,一般對生長環境的要求較嚴格,
生產成本相對地較高,但這些成本往往可由作物的高經濟價
值得到補償。換言之,利用設施從事農業生產,即在提供一
種人造的適合作物生長的環境,從事高價農作物生產。不過
即使利用設施從事生產,並不表示能完全避免病蟲害的發生
,利用生物防治技術與農藥進行病蟲害防治工作仍有其必要
性。
目前生物防治技術的範圍,尚只限於部份的病蟲害防治
,全面性的病蟲害防治工作仍必須配合農藥的使用。由於受
作物特性、生長環境與栽培制度的影響,有關設施內病蟲害
防治的施藥設備與方法與一般田區有所不同。
利用設施生產,其作物生長環境最大之特點為封閉性空
間,在封閉空間內有利於自動化控制技術的施用,可提供作
物最佳生長環境從事農業生產,在設施所概括的範圍內,除
提供‘一適合作物生產的環境外(溫、濕度相當),並可隔
絕或降低外在不利生長因素的影響;但這種封閉性環境特質
,再施藥作業時對施藥者的危害持續延長,在設施內從事施
藥工作要完全避免受農藥之侵襲,幾乎為不可能的事。設施
本身具有環境調節功能,雖然不同的設計與材質在環境調整
程度上會有所不同,但目前國內利用設施生產的主要障礙為
成本太高,環境控制尚無法完全達理想。設施內施藥作業環
境不良的問題非常地嚴重,為了保護施藥者的安全,往往要
求穿著適當的防護設備,這些設備常使高溫高濕問題更形惡
化。
設施為一種技術、資本密集式的生產,生產成本相當地
高,為盡量發揮生產功能,必須充分利用有限的空間,在規
劃生產時須充分利用表面直接從事農作物生產,儘量將設施
內作物以外的空間讓於機械做各式運轉,以設施的主體結構
連接成機械運行的通路,如此不但不防礙生產,更可進行機
械自動化作業的規劃。
(一)、病害的防治方法
1、病原體的入侵防止
擬定病原體、細菌及菌類等之侵入路徑的防止策略有其必
要,例如感染的種子必需經過熱處理或藥濟消毒,帶病植株與土
壤介質等避免進入設施內,因此必需先行隔離觀察,或更換土壤
計、介質或施用藥濟後再移入設施內。灌溉用水流入設施前須經
處理以防止污染,設施結構、作業人員之衣服、手足需洗淨消
毒,使用紗窗避免帶原昆蟲的侵入,設施週邊淨化以免病原體飛
入。
2、設施內病害增殖抑制
帶病作物需及早除去,並考慮土壤傳染病毒及各種有機質的
施用情況,此對病害增殖抑制的影響很大,因此於定植前,土壤
應先經蒸氣或藥劑消毒,夏季時設施儘量保持密閉性並對栽培狀
態需有詳細的記錄,詳述如下:
(1)、栽培作物之健康與病害要能明確之診斷
植物之健康與病害之分際其實是一種主觀之分別與認定,對於生
物性病原引起之傳染性病害而言,病害與健康間之分野較為清
處,較容易把握防治時機。但對於生理障礙等非傳染性病害,健
康與病害間之分際則較難以認定,因而影響防治時機之準確性。
且許多發生生理障礙之植株由於抗病力會逐漸降低,最後將導致
病原生物之感染而造成明顯的危害。因此栽培者本身應對自己作
物之健康狀態及達到健康狀態所需之生長條件如肥料、水分之管
理均能有明確完整的掌握,如此當作物產生異狀之初期,才能適
時加以控制,避免進一步病害之發生。
(2)、栽培管理措施需有完整詳實之記錄
包括土壤調配、施肥、藥劑處理狀況等均需有詳實記錄管理措
施,以便於植物發生異常現象時即能根據記錄輔助進行判斷。對
於栽培還境包括氣溫、相對濕度、雨量、雨期等及土壤狀況如pH
值 、 EC值、有機質及微巨量元素含量、通氣性等亦應有完整的
掌握。
(3)、對所栽培作物可能發生之病害種類、發生生態、診斷原則
及防治要領等資訊應儘量收集,以掌控可能發生狀況。
(4)、所栽培作物全年中發生之病害種類、嚴重程度及品種品系
間感病性差異等應有完整之記錄,此記錄可配合栽培環境之記錄
形成一極具參考價值之全年病害消長資料,提供擬定有效病害管
理對策之根據。
3、設施內環境健全化
除濕是防止多濕性病害發生之最佳策略,另外設施內之環境
需經適當的控制,管理作業必需合理化等:
(1)、定期消毒栽培設施與器具
除了栽培土會遭受病菌污染而導致病害發生外,設施內常用之器
材如噴灌頭及管路等,以及植床、植架、走道等亦必需列入例行
之消毒清潔對象。
(2)、設施內衛生工作之確實執行
設施內發現可疑之有病植株應立即移出,植株以及其所用之土壤
應立即銷毀。不可堆置於園內之棚架下或角落而形成重要污染來
源。對於有些可以產生大量分生孢子的地上部真菌病害如灰黴
病、炭疽病等,亦不可丟棄殘體於設施附近,孢子仍可藉風雨傳
至設施內危害植株。若發現有受傷枯死之葉片或枝條應儘速摘
除,如此將有顯著降低灰黴菌發生之效果。
(3)、避免葉部潮濕可防止葉部病害之發生
作物栽培技術中水分之供給是決定品質高低之重要環節。但不當
的供水方式卻是導致病害發生之主要誘因。病菌之侵入、繁殖與
傳播均需藉助適當的濕度才能完成。尤其是許多真菌孢子之發芽
與侵入感染,通常需要在葉表有水膜之情況下才能完成。因此栽
培者若能改善給水方式或促進設施內空氣對流,避免葉面水膜形
成時間太久則必能有效防止葉部病害包括細菌性軟腐病之發生。
(4)、老化植物與土壤之管理
當土壤介質中之營養組合、pH值、通氣性、保水性等物理環境之
自然劣變時,植物通常會漸漸處於逆境(under stress)生長狀
態,對於病害抵抗性也逐漸減弱。可考慮更換介質以促進正常生
長或定期以輪作、浸水與休耕之方式來改善。
4、 作物抵抗性的強化
包括遺傳對病蟲害的抵抗性,防止病原體感染的抵抗性,栽
培場地於感染後的增殖防止的抵抗性等,遺傳對病蟲害的抵抗性
主要受少數的主動遺傳因子支配,因此設施內作物選擇具有抵抗
性之品種將有助於抵抗性的強化。不同作物種類對病害發生之抵
抗性常有差異。甚至同一種作物之不同單株間之抵抗性也有不同
,栽培者經多年栽培累積豐富之個人經驗後,可將具有抵抗性之
品種或單株加以擴大繁殖成一品系栽植,則對某些不易防治之病
害如細菌性、病毒性及土傳性病害之控制必有相當幫助。
5、農藥的利用
藥的使用為病害防治工作的最後手段,農藥的使用基準需從
藥劑的成分與散佈情形、栽培者的經驗累積、病害種類以及發病
時期來預測。農藥使用需注意的事項列舉如下:
(1)、正確診斷後,對症下藥。不濫用藥效不明藥劑,不任意提
高濃度,不隨意混合藥劑。
(2)、掌握施用時機。有些病害在適合發病之環境出現後即需立
刻施用,否則當病害發生,病徵出現後再施用已無法壓制。
(3)、確定危害部位。藥劑必需均勻且有效地達到危害部位才能
表現藥效。
(4)、避免長期連用同一有效藥劑。應視病害發生潛勢之高低加
以規劃,輪流使用數種藥劑。如此可避免刺激抗藥性病菌之發生。
(5)、注意施藥時之天候狀況,避免因過熱發生藥害或天雨沖刷
而失效。
(6)、注意藥劑之有效日期、使用及儲放方法以維持最佳效果。
(7)、藥劑施用後之裝置如噴頭、噴管及藥槽等須清潔處理,以
免不當藥劑之混合造成藥害或其他安全上之疏失。
(8)、對所有使用藥劑之種類、劑量及施用方法與日期應有完整
之記錄。
(二)、蟲害之防治方法
蟲害的防治因害蟲種類不同而有個別的具體防治方法,設施
內因冬作時的生育溫度保持,使得害蟲的發生有周年化的情形,
另因風雨、天敵攻擊的機會減少、作物時常的密植與農藥的重複
使用等,使得蟲害的發生密度提高,根據上述之設施栽培特性,
蟲害之防制方法可分為防止害蟲的侵入、設施內害蟲增殖抑制以
及農藥的利用等。
1、害蟲的侵入防止
害蟲常經由設施週邊的寄生植物上、換氣口以及人的出入口
侵入設施內,所以設施週圍的環境必需保持清淨,儘量避免香氣
濃烈的植物栽植與雜草的滋生。注意勿把帶蟲的植株或種苗帶入
設施內,以免其傳染並擴大發展。必要時可在換氣口設置防蟲網
、對種苗加以藥劑除蟲或利用紫外線除去被覆植株的害蟲等。
2、設施內增殖抑制
其方法有在作物栽植終了時將受寄生的植株與雜草完全除去
,並將設施中之栽培設備等完全洗淨,或利用害蟲的天敵增殖釋
放於設施內等,另外土壤與介質的消毒對害蟲的增殖抑制亦很有
效果。
3、農藥的利用
適時適量的施用農藥才能達到防治害蟲的效果,設施栽培初
期散佈農藥,可使害蟲初發密度控制在期望的標準下,並隨著作
物的生育過程,施行莖葉的混合防治,以避免害蟲的卵與幼蟲、
成蟲等大量混合發生的情形,但在果實收穫的初期,必需加強限
制農藥的散佈使用,並須注意同一藥劑的連用將增加害蟲的抗藥
性等問題。
設施內病蟲害的發生,因栽培環境、栽培方式、作物種類、
抗病能力、設施環境與土壤性質等不同而有所差異,其中影響較
嚴重的環境因子包括:溫度、相對濕度、土壤濕度、土壤PH值與
肥力等。本節主要針對設施內施藥設備進行探討。
由於施藥作業的要求首先為藥液微粒化,藥液微粒化必須配
合機械與器具的使用,現依藥液微粒化方式與施藥作業方式的差
異將設施內施藥機械歸納成下列六類:
(一)、噴溉噴藥
國內有些設施具有自動化噴灑設備,除可用於灑水灌溉外,
另一大功能為降溫。由於水與混合農藥均呈液狀,這套系統常同
時被用來進行自動化施藥作業,這種混合使用往往忽略了兩者作
業要求的不同,並不值得鼓勵進行。
(二)、手動噴嘴
這是施藥作業,由人手持噴嘴拖動藥管於設施內進行噴藥作
業,此種方式施藥者受藥侵襲之機會極大。此外此種作業方式在
設施內必須保留作業者行走的通路,很多時候由於噴嘴作業的有
效距離有限,行走通路密度相對地高,如此對土地的消耗也大,
形成有限作物栽培面積的浪費。若利用活動床方式栽培可減少通
道的數目,如此可降低有效生產面積的消耗,但活動床的投資成
本增加。另國內常用的背負式噴藥機械,其基本作業方式與此相
仿,唯設備較簡單,不需長藥管,作業壓力較低,藥液霧化品質
也較差,但施用極為方便,設備成本低。
(三)、煙霧噴槍
施藥作業的基本要求之一為霧化後的藥微粒儘可能地大小均
勻,作業後對作物的覆蓋必須完整,在室外進行施藥作業時,由
於擔心漂散,一般藥液不敢過度霧化,否則微小藥粒的漂散,不
但會造成農藥的無謂浪費,有時還會造成藥害問題。但在設施內
進行噴藥作業時,由於是在密閉空間內,微粒漂散的現象不會發
生,作業的霧化程度可以提高,霧粒可較細。煙霧噴槍的藥霧粒
平均粒徑為20∼50 μm,霧粒細且使用的藥稀釋倍數低,整體藥
液使用量較低,微小的藥霧粒由流動空氣送至作業區,但為確保
噴藥的完整覆蓋性,一般仍以人力背負式,或手推式於作業通道
上作業,作業距離則依所使用的送風空氣壓力而定。
(四)、噴桿式噴嘴
利用噴桿進行噴藥作業,一般藥液霧粒均勻,作業範圍大、
效率高。與手持噴嘴式作業比較,若手持式要求作業有效距離遠
,噴嘴藥液的流量必須大,霧粒粒徑亦大,如此霧化品質差,霧
粒均勻度不良,若改用噴桿式作業,在同一根管路中,有數個噴
嘴,每個噴嘴作業範圍固定,適當的藥液量與壓力,霧化後藥微
粒品質佳,每一個噴桿所能連接的噴嘴數可視藥液壓力、流量而
定。
噴桿的運動可利用設施內的自動運搬系統,噴桿作業的有效
寬度則視溫室的跨距與運搬系統的距離而定。噴桿在大跨距溫室
內,長度可達12m。噴桿噴藥作業一般使用普通藥液,以管路輸
送藥液,作業有效距離受設施結構的限制;可改以離心式噴頭,
機體本身雖小,但依靠離心力作業有效範圍加大,又使用濃縮藥
液,藥液用量小,如此可部份減低噴桿噴藥的問題,運動方式與
噴桿型相類似。
(五)、煙霧機
設施內噴藥作業時飄散不會構成問題,因此對藥液霧滴粒徑
的要求越細越好。一般單流式噴頭,藥液粒徑平均約為200μm,
對設施內的噴藥作業而言太大了,若採用雙流式噴頭,平均粒徑
可降至20μm,霧滴越小懸漂在空氣中的時間越久,與作物接觸時
間相對地也延長且有效覆蓋面積增加,如此可強化施藥效果,煙
霧機即是利用此原理發展的。將藥液利用雙流式噴嘴噴出,藥霧
粒懸漂在空氣中,受重力影響會下沈落於農產品之表面,一般上
葉面之覆蓋效果良好,為加強作業的覆蓋效果,可在噴嘴位置加
裝鼓風機,利用此增加藥液粒與作物的相對動量,提高噴藥作業
效能;設施內由溫度差所造成的自然對流亦是很重要的藥液分佈
力量,煙霧機由於所使用藥液霧粒非常細小,為使能發揮病蟲害
防治的作用,故須吏用ULV藥液,此種藥液由於毒性較強,一般
限制較嚴,此外施藥後,霧粒在空氣中漂浮的時間很久,24小時
內禁止進入,在進入前必先行通風以免傷及人體。
(六)、無人自動噴藥機
利用設施栽培作物須採事先規劃,規劃內容為空間的使用與
作物栽培方式、種類,規劃妥善之空間將有利於無人自動化施藥
作業的進行,如此可避免農藥對施藥者造成的傷害,設施內作物
一般可分成直立高型作物,如洋香瓜、蕃茄,與平舖矮型作物如
蘭花、金線蓮等,矮型作物對空間的阻隔性較差,可利用煙霧機
進行作業,高型作物對煙霧有阻隔作用,有效作業範圍會被侷限
在兩排作物之間。因此煙霧機對高型作物效果有限,此可經由改
良煙霧機的運動功能而得到改善。無人自動噴藥機行走於作物之
間,以畦溝控制行走,利用軌道進行換畦作業,系統內主要控制
功能有行走換向、換畦定位、噴藥啟始、終止與全系統控制。利
用噴桿進行業,針對不同的作物可用不同的噴桿,一般噴嘴略微
朝上,採用朝上式噴藥,如此可增加葉背面的覆蓋效果,而當藥
液自上落下時亦能達到葉正面覆蓋的要求。為增加藥粒的穿透
力,藥粒粒徑較大,系統用單流式噴頭,使用普通藥液,雖增加
了處理的藥液量,但在藥劑的選擇上彈性較大。
(一)、噴藥自動化之基本要求
1、無人化
這是對施藥者最佳的保護。無人噴藥的實現,首先必須克服
機器行走的問題。在困難的地形可採用不需行走的定置式管路噴
藥系統,在溫室內則可利用工業界普遍使用的室內自動行走技術。
2、適量化
噴藥作業的基本要求為適時、適地、適物與適量,也就是說
在該作業的時候噴藥,噴藥的地方要切中要點,所噴藥要符合作
物及所防治病害的要求,同時液滴顆粒大小須均勻適當,用藥量
要恰當適量。在噴藥作業中若藥量使用不當,對作物而言過量用
藥會造成藥害,不足則蟲害防治成效不彰,影響收成,此外不當
的用藥易造成環境污染。噴藥作業用藥量的管制,常以設施面積
大小、作物特性等為基準,目前依面積實施定量藥量的自動化控
制技術,對藥量的控制頗具成效。
噴藥自動化的內容,可依技術與作業方式的不同加以區分。
技術發展重在利用自動化技術進行運動與噴藥作業監控,常見之
己開發技術,只適用於噴藥系統的某一部分而己。作業發展重在
利用已有的自動化噴藥技術,強化改進田間作業的效能。各種不
同田區,依其本身作物特性,選擇己開發且適用的自動化技術加
以改良,在目前雖難以達全面自動化,但作業功能方面自動化的
機械與設備己相當普遍。為全面達到無人化、適量化的境界,噴
藥自動化發展的方向在智慧型噴藥系統的實現,利用自動化的感
測技術、專家系統、控制系統與作業設備,進行最完善的病蟲害
防治作業。
(二)、噴藥自動化技術發展重點
噴藥作業在考量無人化與適量化的要求下,其自動化技術發
展的範圍主要包括下列項目:
1、自動化運動
將類似自動導引車(AGV)的運動導引技術應用在施藥機
械上,以達到自動化運動的目的。雖非所有自動導引車使用的自
動導引系統均可用在農業,但某些自動導引車的導引糸統確可應
用於農業,尤其是設施農業。設施內之農業生產空間的利用經過
周詳的規劃,在設施內可利用軌道、索道、電纜等進行自動化運
動,在國內外己有不少實際的使用案例。又作物生長各階段作業
要求不同,亦常引發以單一固定型式的自動化運動系統無法滿足
所有作業要求的困擾。
在設施栽培中利用自動化的管路灌溉系統進行施藥作業亦為
可行的方法,在系統內農藥經過管路輸送至整個設施栽培區域進
行作業,省時省力,但管路噴藥作業需較大的噴霧壓力以及耐腐
蝕、高壓之閥門與噴頭,且亦會影響噴霧效率。此系統自動化程
度相當地高,但設備成本也高,適用於高價作物。
2、選擇式施藥
一般施藥機械作業時,用藥有效率相當低,而有效率低的主
要原因為作業方式不當,全面性地毯式的施藥方式有許多農藥是
施放於無作物的空間內,這種作業方式不但浪費農藥、增加生產
成本,同時也易造成環境的污染與生態的破壞,困此取代全面式
施藥的選擇式施藥一直為自動化施藥機械發展的重點。所謂選擇
式施藥主要指施藥機對作物有自動偵測功能,施藥作業的進行,
須配合作物的存在及有效範圍的掌握;換言之,即施藥機械具有
作物辨識與距離判定的功能。目前國外以超音波(Ultrasonic wave)
辨識作物的選擇式施藥機械,可節省用藥達50﹪以上;利用雜草
與土壤顏色的差異,以影像技術區分的選擇式施藥機械,在澳洲
使用可節省用藥30﹪以上;另利用紅外線(Infrared Technology)
辨識植物存在的自動化系統,亦正在研發中。
3、流量與壓力控制
施藥作業的品質要求為均勻、完整、適量,這種作業品質的
要求在實際施藥作業中,常因操作人員的不同,而無法維持,用
藥量會因作業速度的過快而不足或過慢而過量。為確保作業的品
質與用藥量的適當,藥量與藥壓的自動控制系統將依據設施栽培
中所計劃的最佳額定施藥量,以實際的作業行進速度控制流量與
壓力,控制作業的品質符合要求。
4、位置與方向控制
如何正確掌握噴嘴與作物兩者對應位置與方向,為確保作業
品質的一項重要工作。若噴嘴過於接近作物,則作業區域範圍縮
小覆蓋將不完全,範圍內之作物會因藥量過多而生藥害,範圍外
則會因藥量不足而生病蟲害;若噴嘴與作物距離過遠,則會有作
業不均勻的問題,同時也增加了藥物漂散(Drift)於設施間的危
險;另若噴嘴的方向與作物有偏差,則將明顯地降低有效附著率
。因此在施藥作業的自動化發展中,如何確實掌握噴嘴與作物間
相對應的位置與方向為重點項目之一。
單一噴嘴受作業寬度的限制而影響作業效率,大型化施藥機
械常在噴桿上裝設多個噴嘴,配合藥液的輸送管路,利用多噴嘴
進行大面積式作業,此種方式維持噴桿與作物的正確高度與距離
,是為確保施藥品質的重要工作。目前己有利用超音波式的噴桿
自動控制系統(參考圖 10-1 ),可同時維持噴桿與作物間的高度
與距離,此超音波式控制系統隨著作業寬度的增加、噴桿長度的
增長而愈顯重要。
5、殘藥回收
施藥系統如何在作業完後回收輸送管路內的殘藥,為一不可
忽視的重要自動化發展項目。施藥系統中殘藥的回收不但可節省
用藥,可延長系統的使用壽命,更可避免任意棄置所引發的環境
污染問題。

圖 10-1 噴桿自動控制系統
6、藥滴大小控制
施藥作業對藥滴的要求為顆粒分佈均勻、大小一致;不要過
大的藥滴,會形藥斑,也不要過細的藥滴,因為會造成漂散現象
,污染環境。在實際作業中,液壓噴嘴所製造出來的藥滴,粒徑
分佈的範圍相當地大,有大有小,控制與回收這些過大或過小的
藥滴,當可大幅改善施藥的作業品質,當然回收的藥液可再重複
使用。有關藥滴回收系統的開發,雖為施藥系統自動發展的重點
,目前仍僅止於實驗室內。
7、物理性防治
目前雖仍以化學藥物的施用為主要的作物保護手段,但對環
境幾乎無任何危險性的物理性防治技術的比重正逐漸增加中。所
謂物理性的防治技術,即為利用聲、光或力學的原理進行蟲害的
防除上成果較為凸顯,己有的自動捕蟲器,即是利用音波或顏色
誘殺害蟲。現有不少科學家正從事各種有關害蟲對環境物理性認
知與反應的研究,這方面的研究將大大地有助於未來物理性病蟲
害防治技術的開發。
8、智慧型管理與控制
作物生產中病蟲害防治作業的施行,一般主要依據生產者對
環境與作物的認知採固定模式進行,這種病蟲害防治方式其實效
果不差,但許多生產者為確保防治工作的成功,作業時用藥常有
頻度過高或藥量過重的情形,為減少這種過度用藥的發生,可利
用智慧型的控制系統得到改善。利用現代化的感測技術,確實偵
測作的生理狀況與蟲害程度,以專家系統進行分析,以最佳經濟
式取產量保護式,制定策略。在國外己有作物生長狀況識別系統
,此系統除可偵測並記錄作物的生長狀況與環境因子外,同時可
計算蟲的數目、估計蟲的密度,此系統確實提供了許多蟲害防治
策略制定的重要參數。智慧型控制的發展,除自動化技術外,尚
需要有作業資料庫與管理策略,這些工作必須要有作物栽培或植
保人士的配合共同進行。
(三)、設施內噴藥自動化範例
1、索道式噴藥(Cable Spraying)
利用設施結構於作物上端架設索道供機械沿索道運動,用來進行
自動化噴藥系統,此即為索道式自動化噴藥系統(如圖 10-2
)。索道式噴藥作業控制,主要分為行走控制與噴藥作業控制,
行走控制常由纜繩的拉動捲放著手,噴藥作業控制一般只作啟止
控制。單一索道上單一噴頭,其作業範圍有限,為擴大作業效
能,常利用噴桿進行多噴嘴面積式作業,亦有利用多條索道者。
索道式噴藥依索道式之數量及架設方式,可分為單索、雙索以及
複式等類。將桿式噴藥機構架設於索道上,以纜繩拉動噴藥桿運
動,藥液輸送管路配合捲動裝置沿索道架設,並利用極限開關進
行作業上自動啟止及換向工作,其它適合噴桿使用之噴藥及控制
機構,在此皆可使用,此機構並適合於設施內使用,架設成本
低,使用方便,自動化程度亦高,惟長距離使用時,要控制兩條
索道全程一致平行不容易,使用時受限制,若不靠考慮索道的下
垂問題,可採用單索懸掛式方式進行作業。

圖 10-2 索道式自動噴藥系統
2、機器人式噴藥車(Robotic Sprayer)
機械人式即無人自動噴藥車。溫室內的生產採事先規劃,若
規劃妥善將有利無人自動化噴藥作業的發展,如此可避免農藥對
施藥者造成的傷害。溫室內作物一般可分為直立高型作物,如洋
香瓜、番茄,與平舖矮型作物,如蘭花、金線蓮等。矮型作物對
空間的阻隔性較小,可利用煙霧機進行作業,高型作物對煙霧有
阻隔作用,有效作業範圍會被局限在兩排作物的空間內,因此煙
霧機對高型作物施藥效果即受限,但此可經由改良煙霧機的運動
功能而得到改善。
針對高型作物可使用機械人式噴藥車,可自動行走於作物栽
培床間通道,進行施藥作業。機械人式噴藥車之作業除機械本身
具有自動作業功能外,尚須配合作業區之規劃方能達到完全之自
動化。此作業系統如圖 10-3,除自動噴藥車外,系統內須有能自
動啟止控制之藥液輸送設備,另設施須有適當之規劃,以導引車
子行進,在兩端須有作業範圍指標,為系統行動換向控制用,指
標的位置務必與栽培床間之通道確實配合。
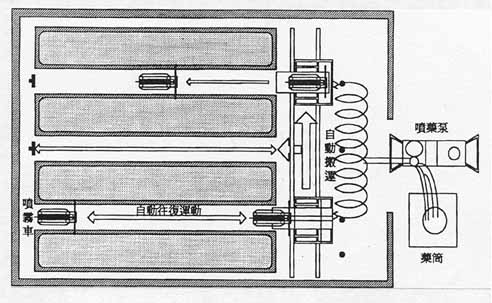
圖 10-3 機器人式噴藥車作業系統圖
機械與系統之作業程序如圖 10-4。作業之說明如下:自動噴
藥車往返於栽培床通道中,一次作業完成後,以自動搬運裝置將
噴藥自動移至下一個通道。本噴藥作業系統是於枕地上裝設軌道
作定位自動搬運工作,作業中利用感應器與控制機構進行全自動
作業,可防止農藥直接傷害人體的弊病,亦無須擔心人力不足。
本系統自動噴藥車可於簡單畦溝中行走,若無畦溝可在設施通道
中以高五公分以上之橫木圍築而成。採用前輪驅動對略為彎曲的
通道亦可正常作業。本系統利用雙動力,以引擎與一般電力為主
要選用動力,可依據設施與狀況決定。

圖 10-4 機械人式噴藥車之作業程序圖
機械人式噴藥車主要之控制機構,如圖 10-5。車體上共有四
組感測器進行下列控制工作:
(1)、運動方向轉換控制
指標設於設施一端的盡頭或換道完成後,做前進、後退、及
換向控制工作。
(2)、施藥啟止控制
可作來回雙程施藥,亦可作回程單程施藥,另在換道作業時
停止施藥,以減少不必要的藥液浪費。
(3)、系統作業結束控制
無人噴藥車在作業至最後一行完成後,系統全自動停止作業
,完全可避免作業人員受藥液污染的危險。
(4)、全系統控制
正常運作中斷時,如施藥機械脫離系統,系統可經由搖控停
止作業,以進行必要之調整工作。
利用噴桿進行噴藥,針對不同之作物可用不同之噴桿,一般
噴嘴略為朝上,採用朝上式噴藥,可增加葉之背面覆蓋效果,而
當藥液自上落下時亦能達到葉正面覆蓋的要求。在噴桿下方裝設
電池,利用重力方式控制噴桿方向,噴桿在作業時與地面保持垂
直,可避免在作業時,受地形不平整之影響,造成施藥不均勻,
降低了作業品質。

圖 10-5 機器人式噴藥車控制機構
[第九章] [回到主畫面] [第十二章]
|